
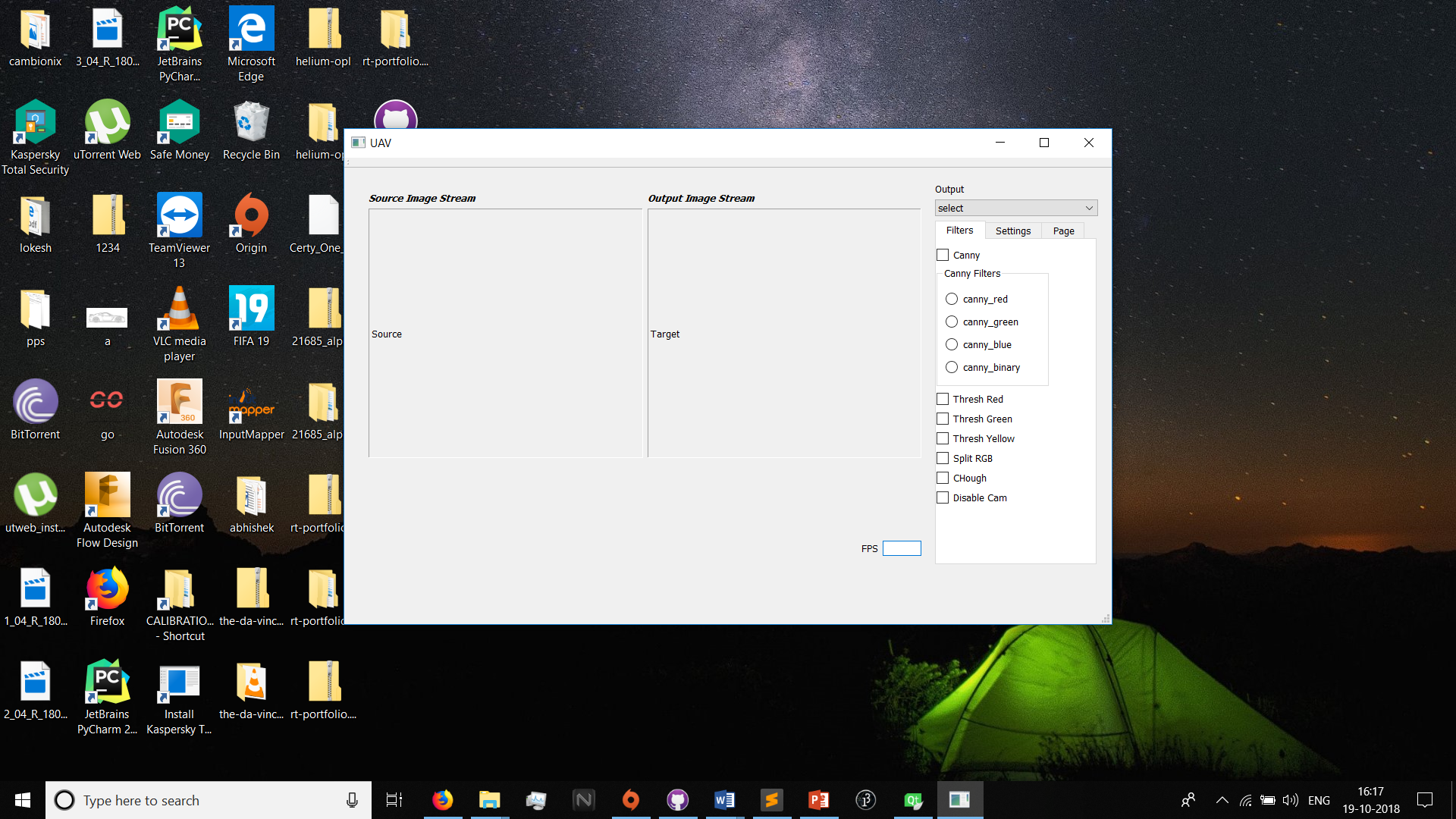
In this project I created a Gui for image processing where i get live image data from the onboard camera of an mobile robot and process it for various parameters that include filtering , noise reducing , template matching , object detection and etc. The this data is used for the navigation of the robot.