
In this project, we have designed a autonomous vehicle which is cost effective and powered by Robotic Operating System (ROS). The vehicle is capable of maintaining a constant speed and distance for monitoring or surveillance. ROS is implemented for trajectory tracking and telemetry. A low cost compact on-board embedded system powers the vehicle. Various image processing techniques are been implemented for navigation and obstacle detection. Artificial Neural Network which helps in finding the shortest path by using the acquired data from image processing. Different controllers were implemented for movement and obstacle avoidance including PI and PID. The performance were compared and the results are also discussed in this paper.
As the team lead for the project I was responsible for the planning and execution of the project. I was also resonsible for the software and control system of the project.
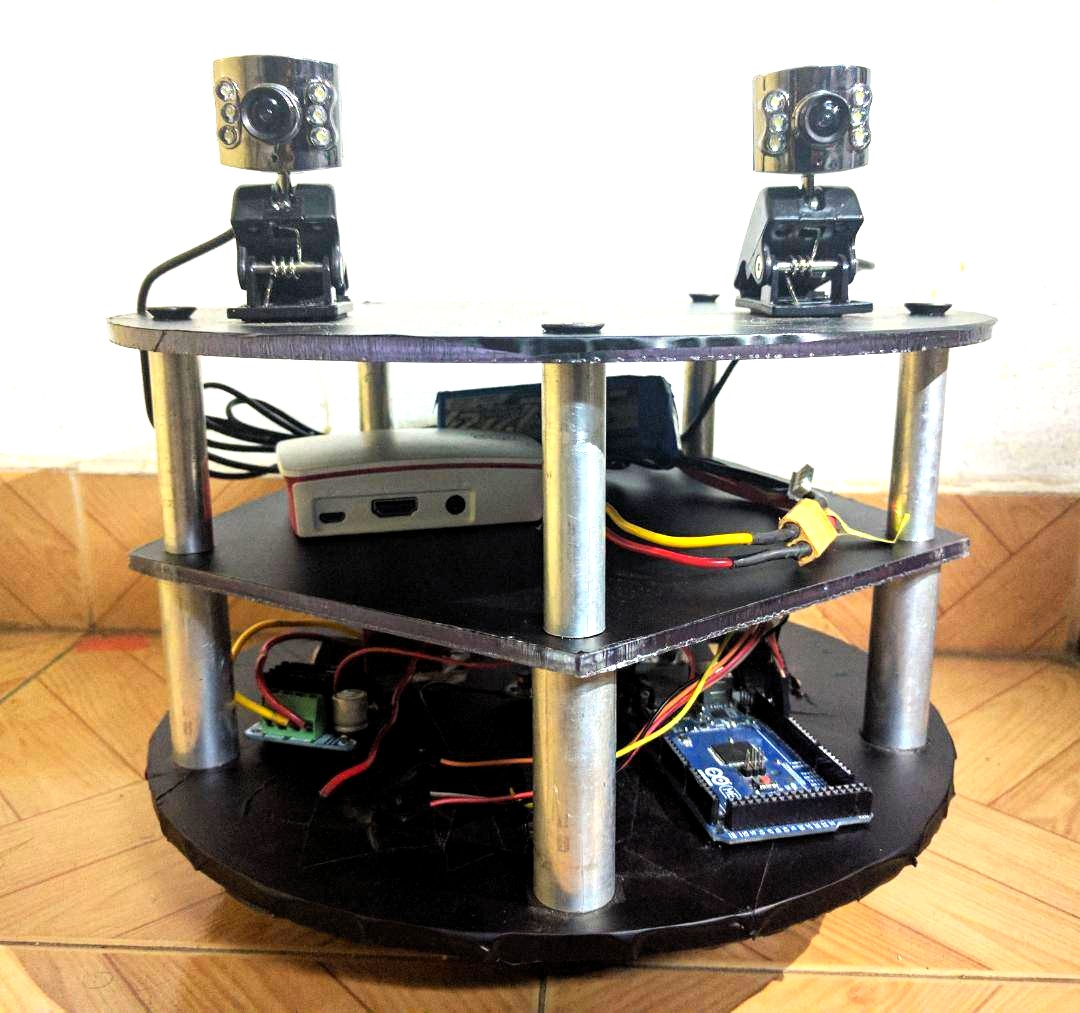
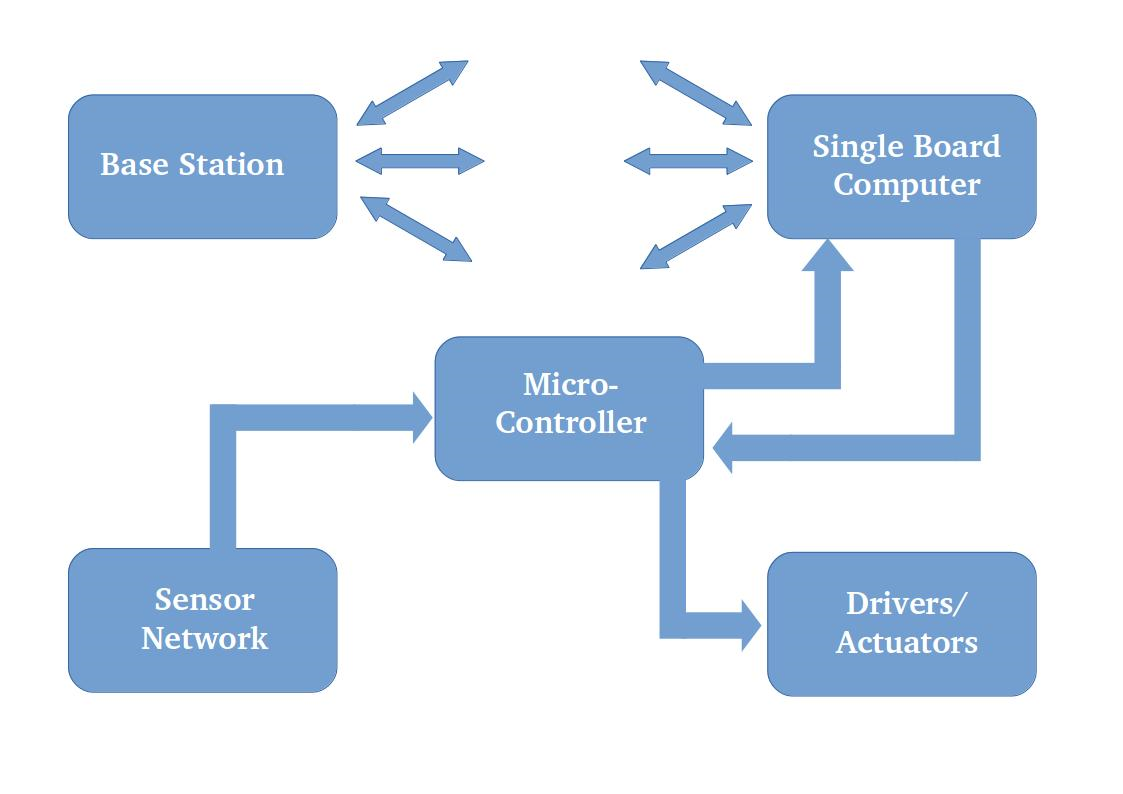
The software system consist of QT-GUI, Control system is designed using arduino. I used ROS for communication and to gather sensor values from the drone for calculating trajectory and for navigation.The data from the stereo vision system is used for calculating the path of navigation for the robot. The video is then transmitted using wifi with the help of Ros Opencv Bridge and communication packages.
The System was equiped with a onboard microprocessor which was used for the collecting gps , gyro and other sensor values from the vehicle which is then transmitted to the base wih the help of ROS. These data where then processed in the base computer for several factors on which the trajectory is planned.