

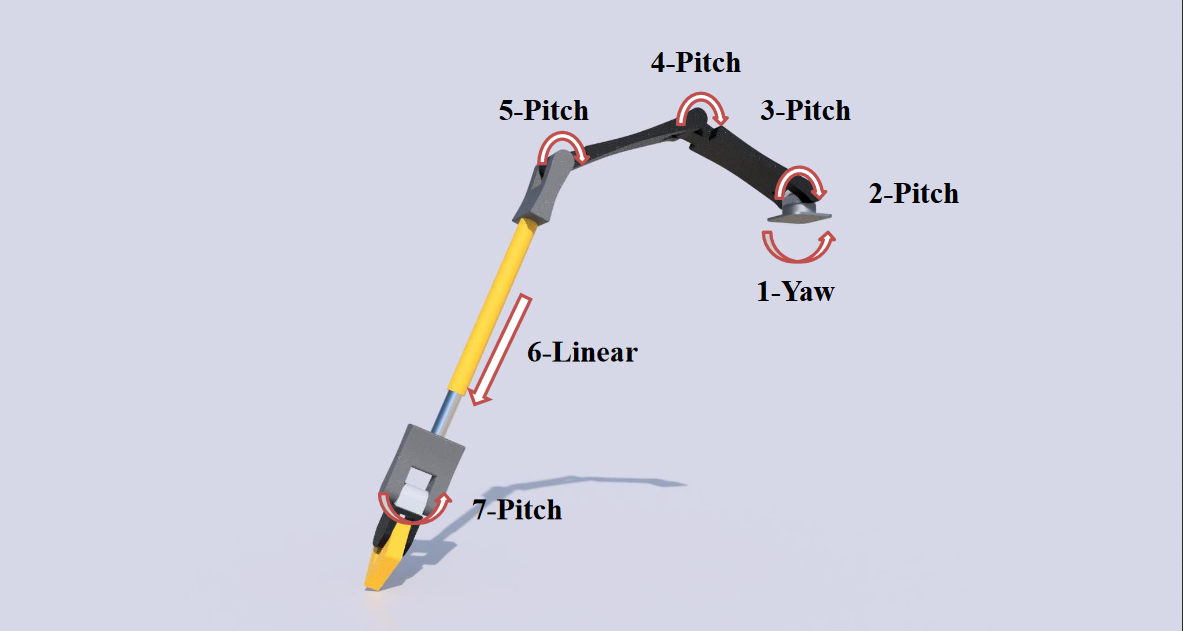
This paper describes about the Martian Exploratory Rover which can reduce the various barriers in surface exploration. The Rover is inspired from the anatomy of an ant. Like an ant’s body the rover consist of individually suspended six leg mechanism which enables the rover to move through rough terrains. The Dinoponera agility is implemented in a carbon fibre Suspension. The chassis are controlled by automatic feedback system that allows the rover to maintain traction and with the alternating thread pattern in the wheels, it can travel through different kinds surfaces. The rover carries a series of small Swarm bots which are loaded on the rear end of the main rover. The Swarm bots are designed to explore narrow caves and dents to gather soil samples. The processing is faster as the Swarm bots are attached to the Main Rover’s Network. Utilizing the Rover’s belly Camera, the wheels are protected from various foreign objects which pose a serious threat to the rover’s movement. The guidance system is automated and relies upon stereo imaging from the Lead Camera. The analysing technique is carried out with A* algorithm coupled with Artificial Intelligence and Machine Learning in order to optimize Efficiency and Fuel Consumption. The Robotic arm On-board the Rover is a 7 DOF Robotic Arm with a planetary base gear drive , and a Harmonic Gear-Train for the shoulder, with the additional degree of arm being a linear actuator for a DOF in the 2nd linkage of the arm. The Swarm bots when deployed uses its own individual power system and is charged when it is docked in the main rover. With this unique design we can carry extensive sampling exploration over narrow and lower surface effortlessly.