
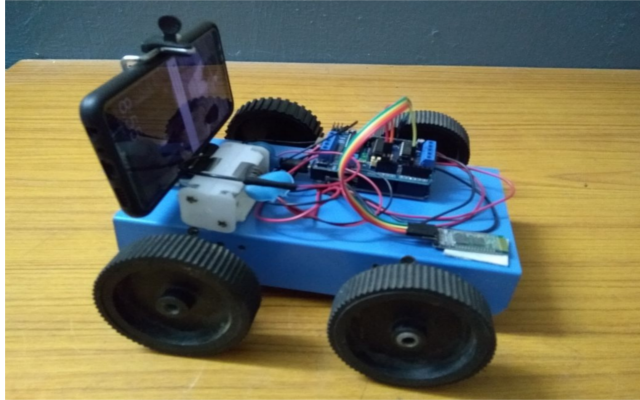
Autonomous Intelligent Robots can perform desired tasks in unstructured environments without continuous human guidance[1].In this project we are developing a Vision based object tracking semi-autonomous robot which uses an android app to capture and process images and then the data is transferred to arduino. This data is processed to find the exact location of the object and then the controller send data to the motors to track the object
In this project i have used opencv with android studio and arduino to control the Robot.
The Android phone camera capture real time data and calculate the position and distance of the object with the data using various image processing techniques and calculate the velocity and direction of movement of the object and track the object accordingly.